Relationship to other projects/themes
WP5.2 links to the identification work in WPs 1.1 and 1.2. The Theme 2 work is very important for energy harvesting which also strongly links with Theme 4.
Aims
To exploit nonlinear effects to achieve structural control systems which are more efficient, reliable and autonomous, than those with current linear control technology.
Progress to date
By the end of the first year, a theoretical analysis had been conducted of an energy harvester with nonlinear damping, which showed promise, and some initial results for the nonlinear end stop dynamics in an inertial actuator had also been obtained. Since then, the theoretical analysis of an energy harvester has been written up and published [3,5,10] and the initial design for a practical device has also been built and tested [6].
The model of end stop dynamics has also been used to predict nonlinear regimes of oscillation in feedback systems [4], a new area of work has begun on the active control of nonlinear fuselage systems, and significant progress has been made on the experimental implementation of parametric oscillators.

Figure 1: Energy harvesting demonstrator rig
The experimental energy harvester, which acts as one of the demonstrators in the project, was designed by Mehdi Hendijanizadeh, incorporating a moving mass, ball screw and rotational generator, as shown in Figure 1. It is based on an analysis of the greater electromagnetic coupling coefficient of such a rotating generator system, over a linear moving coil system [2,7], allowing a stronger mechanical effect when electrically shunting the generator.
Figure 2 shows the predicted variation of the level of the normalised power harvested by such a device, as a function of normalised excitation level on resonance, with a linear and cubic electromagnetic damper, contributing to WP 5.1 and MS3. Compared with that harvested using a linear electromagnetic damper, the power output of the nonlinear device is always larger when the excitation is below its maximum level. The experimental harvester is significantly larger than most designs, having a 10 kg inertial mass, and was designed to generate tens of watts, from sea motion on a sailing ship for example.
Initial experimental tests have shown that the damping can be significantly increased by electrical shunting of the generator, but that the parasitic damping in the mechanical system is larger than expected and is also nonlinear. This has provided a good case study for identification of this nonlinear damping, undertaken in collaboration with Sheffield, leading to a modified Coulomb model [6].
The device has now been re-designed to mitigate this parasitic damping, achieving a factor of 10 reduction in coulomb damping and a factor of 3 reduction in viscous damping, and further experiments are planned to characterise the mechanical effect of the nonlinear electromagnetic shunt damping. Another experimental system, consisting of an axially-driven beam, has also been built to explore the behaviour of parametrically excited systems.
The experimental measurements of stable and unstable behaviour, as a function of excitation frequency and amplitude of excitation, match the theoretical predictions well. The current work involves the active control of this system, using piezoceramic actuators bonded to the end of the beam.
A different parametric system is also being explored by another Ph.D. student, involving a pair of coils interacting with permanent magnets attached to a beam. This provides a way of controlling the stiffness of the beam and hence of modulating this stiffness as a function of time, to demonstrate parametric oscillation from which energy could then be potentially harvested.
The inverse control of nonlinear systems, WP5.2, is also being perused, with particular application to active vibration control in helicopters. Most models of cochlea mechanics are linear and often assume that the organ of Corti moves as a single unit, ignoring the individual motion of different components.
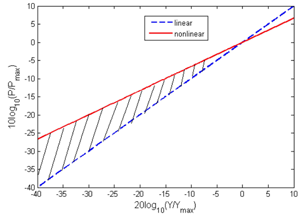
Figure 2: Power output of an inertial power harvester on resonance, having an electromagnetic shunt damping with either a linear or a nonlinear (cubic) characteristic.
New experimental technologies provide the opportunity to measure the dynamic behaviour of different components within the organ of Corti, but only for certain types of excitation. The present work studies the dynamic response of a model of the cross section of the cochlea, at the microscopic level, using the finite element method [1,8].
The individual motion of each component within the organ of Corti, due to acoustic and electrical excitation, is calculated and compared with these measurements, showing a similar internal behaviour to that seen experimentally. The fully active and nonlinear dynamic response can then be calculated, using the predicted linear responses of the basilar membrane motion and of the deflection of the hair bundles of the outer hair cells when driven by the fluid or the outer hair cells, and the feedback loop due to the nonlinear response of the outer hair cells.
This provides a prediction of the fully active internal response of the organ of Corti, which currently awaits experimental verification. In addition a more idealised model of the cochlea, using cascaded nonlinear filters, is being explored by another PhD student as an alternative to current front-end processors in mobile ’phone applications.